"우주서 방향 잃지 않는다" GIST-NASA, 로봇 나침반 기술 개발
조회Hit 2,755회 작성일Date 25-08-22 11:39
페이지 정보
본문
"우주서 방향 잃지 않는다" GIST-NASA, 로봇 나침반 기술 개발
무중력 우주정거장서 회전 오차 단 1.43도
목표 지점 정확히 찾아가는 방향 제어 실현
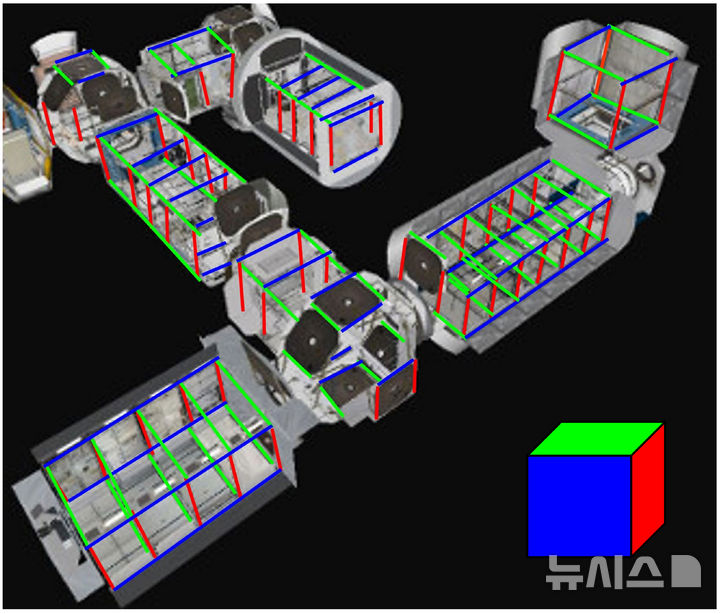
광주과학기술원(GIST)과 미국 항공우주국(NASA)이 협력해 무중력 환경에서도 로봇이 정확한 방향을 유지할 수 있는 첨단 로봇 나침반 기술을 구현해 냈다. (이미지=GIST 제공) photo@newsis.com
[광주=뉴시스]이창우 기자 = 광주과학기술원(GIST)과 미국 항공우주국(NASA)이 협력해 무중력 환경에서도 로봇이 정확한 방향을 유지할 수 있는 첨단 로봇 나침반 기술을 구현해 냈다.
GIST는 김표진 기계로봇공학과 교수 연구팀이 NASA 에임스 연구센터와 공동으로 위·아래 구분 없는 국제우주정거장(ISS)처럼 복잡한 환경에서도 로봇이 방향을 잃지 않고 안정적으로 움직일 수 있도록 돕는 '디지털 트윈(Digital Twin) 기반 시각 나침반 기술'을 개발했다고 21일 밝혔다.
이 기술은 실제 우주 환경을 정밀하게 재현한 디지털 트윈 모델을 활용해 로봇이 누적 오차 없이 '절대 자세(Drift-Free & Absolute Orientation)'를 유지할 수 있도록 돕는다.
로봇의 회전 정확도 지표인 '절대 회전 오차(ARE)'는 평균 1.43도에 불과해 정밀 제어의 실효성을 입증했으며, 약 20밀리초(0.02초)의 빠른 연산 속도로 실시간 적용 가능성도 확인됐다.
이번 성과는 김 교수팀이 NASA 연구팀과 함께 올해 3월 세계 최초로 구축·공개한 ISS 실내 자율 항법용 데이터세트 '애스트로비(Astrobeet)'를 활용한 후속 성과다.

GIST 김표진 교수와 미국 항공우주국(NAST) 에임스 연구센터 공동 연구진. (사진=GIST 제공) photo@newsis.com
ISS 내부의 복잡한 구조 속에서도 혼동 요소를 제거하고 신뢰할 수 있는 구조적 정보를 선별해 로봇의 방향 인식을 극대화하는 알고리즘이 핵심이다.
특히 기존의 수직·수평 구조(맨해튼 월드 모델)가 통하지 않는 ISS 환경에서도 '디지털 트윈' 기술로 정밀한 3차원 방향 지도를 구축하고, 이를 활용해 우주 로봇이 누적 오차 없이 절대적인 자세를 정확히 유지할 수 있는 새로운 기술을 개발했다.
이 기술은 우주뿐 아니라 공항, 병원, 물류창고 등 GPS가 닿지 않는 복잡한 실내 공간에서 자율 로봇의 정밀 항법에 크게 기여할 것으로 전망된다.
김표진 교수는 "이번 연구는 우주정거장과 같은 극한 환경에서도 자율 로봇이 스스로 방향을 찾아 움직일 수 있는 기반 기술을 마련한 것"이라며 "앞으로 이러한 디지털 트윈 기반 기술이 복잡한 실내 공간에서도 자율 로봇의 정확한 길 찾기를 가능하게 할 것으로 기대된다"고 말했다.
GIST 기계로봇공학과 김표진 교수가 지도하고 함중일 박사과정생이 수행한 이번 연구는 과학기술정보통신부와 한국연구재단의 지원을 받았다.
연구 결과는 우주로봇 분야의 대표 학술 행사인 'IEEE'와 연계해 지난 7월29일 미국 로스앤젤레스에서 열린 '제2회 우주 로봇 워크숍(2nd Space Robotics Workshop)'에서 공개됐다.
[출처]=뉴시스
관련링크
- 이전글韓 최초 '우주 의약 연구 모듈', 국제우주정거장 향했다 25.08.25
- 다음글적 레이더 무력화하는 항공기… LIG·대한항공 vs KAI·한화 개발 경쟁 25.08.20